
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Artikkel, mis aitab mõista samm-mootorite ning servo- ja servomootorite erinevust
I. Erinevused samm-mootorite ning servo- ja servomootorite vahel
Sammmootor: on elektriimpulsssignaal avatud ahelaga juhtelemendi samm-mootori osade nurknihkeks või liininihkeks. Lihtsamalt öeldes tugineb see nurga ja pöörete arvu juhtimiseks elektrilise impulsi signaalile. Seega tugineb ta ainult impulsi signaalile, et määrata kindlaks, kui palju pöörlemist. Kuna andurit pole, võib peatumisnurk erineda. Täpne impulsssignaal minimeerib aga kõrvalekaldeid.
Servomootor: toetuge mootori kiiruse reguleerimiseks servo juhtimisahelale, pöörlemisasendi juhtimiseks anduri kaudu. Seega on asendikontroll väga täpne. Ja pöörlemiskiirus on ka muutuv.
Servo (elektrooniline servo): servo põhikomponent on servomootor. See sisaldab servomootori juhtimisahelat + reduktorite komplekti. Oh jah, servomootoril pole reduktori komplekti. Ja servol on reduktorite komplekt.
Piirservo puhul tugineb see roolihoova pöördenurga määramiseks väljundvõlli all olevale potentsiomeetrile. Servosignaali juhtimine on impulsi laiusega moduleeritud (PWM) signaal, kus mikrokontroller saab selle signaali hõlpsalt genereerida.
II. Sammmootori põhiprintsiip
Kuidas see toimib:
Tavaliselt on mootori rootor püsimagnet ja kui vool läbib staatori mähiseid, tekitavad staatori mähised vektormagnetvälja. See magnetväli paneb rootori nurga võrra pöörlema, nii et rootori magnetväljade paari suund on sama, mis staatori magnetvälja suund. Kui staatori vektormagnetväli pöörleb nurga võrra. Selle magnetväljaga pöörleb ka rootor nurga võrra. Iga sisendelektriimpulsi korral pöörleb mootor ühe nurgasammu ettepoole. Selle väljundi nurknihe on võrdeline sisendimpulsside arvuga ja pöörlemiskiirus võrdeline impulsside sagedusega. Muutes mähiste pingestamise järjekorda, pöördub mootor tagurpidi. Seetõttu saab samm-mootori pöörlemise juhtimiseks juhtida impulsside arvu ja sagedust ning mootori iga faasi mähiste pingestamise järjekorda.
Soojuse tootmise põhimõte:
Tavaliselt näete igasuguseid mootoreid, sisemised on raudsüdamik ja mähis. Mähise takistus, võimsus tekitab kadu, kao suurus ja takistus ning vool on võrdeline ruuduga, mida sageli nimetatakse vasekadudeks, kui vool ei ole standardne alalis- või siinuslaine, tekitab ka harmoonilise kadu; Südamikul on hüstereesi pöörisvooluefekt, vahelduvas magnetväljas tekitab ka kadu, mis on seotud materjali suuruse, voolu, sageduse, pingega, mida nimetatakse rauakadudeks. Vase- ja rauakadu avaldub soojuse tekkena, mõjutades seega mootori efektiivsust. Astmemootorid taotlevad üldiselt positsioneerimistäpsust ja pöördemomendi väljundit, efektiivsus on suhteliselt madal, vool on üldiselt suurem ja harmoonilised komponendid on kõrged, voolu sagedus vaheldub kiiruse ja muutusega, nii et samm-mootoritel on üldiselt kuumuse olukord ja olukord on tõsisem kui tavalisel vahelduvvoolumootoril.
III. Rooli ehitus
Servo koosneb peamiselt korpusest, trükkplaadist, ajamimootorist, käigukasti reduktorist ja asendituvastuselemendist. Selle tööpõhimõte seisneb selles, et vastuvõtja saadab signaali servole ja trükkplaadil olev IC paneb südamikuta mootori pöörlema ning võimsus edastatakse reduktori kaudu pöördõlale ning samal ajal saadab asendiandur signaali tagasi, et teha kindlaks, kas see jõudis positsioneerimisse või mitte. Asendidetektor on tegelikult muutuv takisti. Kui servo pöörleb, muutub takisti väärtus vastavalt ja pöördenurka saab teada takisti väärtuse tuvastamise teel. Üldservomootor on õhuke vasktraat, mis on mähitud ümber kolmepooluselise rootori, kui vool läbi mähise voolab, tekitab magnetvälja ja rootori magneti perifeeria tekitab tõuke, mis omakorda tekitab pöörlemisjõu. Füüsika järgi on objekti inertsimoment otseselt võrdeline selle massiga, seega mida suurem on pööratava objekti mass, seda suuremat jõudu on vaja. Kiire pöörlemiskiiruse ja väikese energiatarbimise saavutamiseks on servo valmistatud õhukestest vasktraatidest, mis on keeratud väga õhukeseks õõnsaks silindriks, moodustades väga kerge poolusteta õõnsa rootori ning silindrisse, mis on õõnsa tassi mootoriks, on paigutatud magnetid.
Erinevate töökeskkondade sobitamiseks on olemas vee- ja tolmukindla disainiga servod; ja vastuseks erinevatele koormusnõuetele on servodele mõeldud plastikust ja metallist hammasrattad ning servode metallist hammasrattad on üldiselt suure pöördemomendi ja suure kiirusega, mille eeliseks on see, et hammasrattad ei purune liigsete koormuste tõttu. Kõrgema klassi servod varustatakse kuullaagritega, et muuta pöörlemine kiiremaks ja täpsemaks. Ühel kuullaagril ja kahel kuullaagril on vahe, kaks kuullaagrit on muidugi paremad. Uutes FET-servodes kasutatakse peamiselt FET-i (Field Effect Transistor), mille eeliseks on madal sisetakistus ja seetõttu väiksem voolukadu kui tavalistel transistoridel.
IV. Servo tööpõhimõte
Pwm-lainest sisemisse vooluringi, et tekitada eelpinge, kontaktori generaator läbi reduktori, et juhtida potentsiomeetrit liikuma, nii et kui pingeerinevus on null, mootor seiskub, et saavutada servoefekt.
Servo PWM-ide protokollid on kõik samad, kuid uusimad ilmunud servod võivad olla erinevad.
Protokoll on üldiselt järgmine: kõrge taseme laius 0,5 ms ~ 2,5 ms servo juhtimiseks erinevate nurkade kaudu pööramiseks.
V. Kuidas servomootorid töötavad
Alloleval joonisel on kujutatud servomootori juhtimisahelat, mis on valmistatud võimsusoperatsioonivõimendiga LM675 ja mootor on alalisvoolu servomootor. Nagu jooniselt näha, toidetakse võimsusoperatsioonivõimendit LM675 15 V ja 15 V pinge lisatakse operatiivvõimendi LM675 faasisisesele sisendile läbi RP 1 ning LM675 väljundpinge lisatakse servomootori sisendisse. Mootor on varustatud kiiruse mõõtmise signaali generaatoriga mootori kiiruse reaalajas tuvastamiseks. Tegelikult on kiirussignaali generaator omamoodi generaator ja selle väljundpinge on võrdeline pöörlemiskiirusega. Kiirusemõõtesignaali generaatori G väljundpinge juhitakse pärast pingejaguri ahelat kiiruse veasignaalina tagasi operatiivvõimendi inverteerivasse sisendisse. Kiirusekäsu potentsiomeetriga RP1 seatud pinge väärtus lisatakse operatiivvõimendi faasisisesele sisendile pärast pinge jagamist R1.R2-ga, mis on samaväärne võrdluspingega.
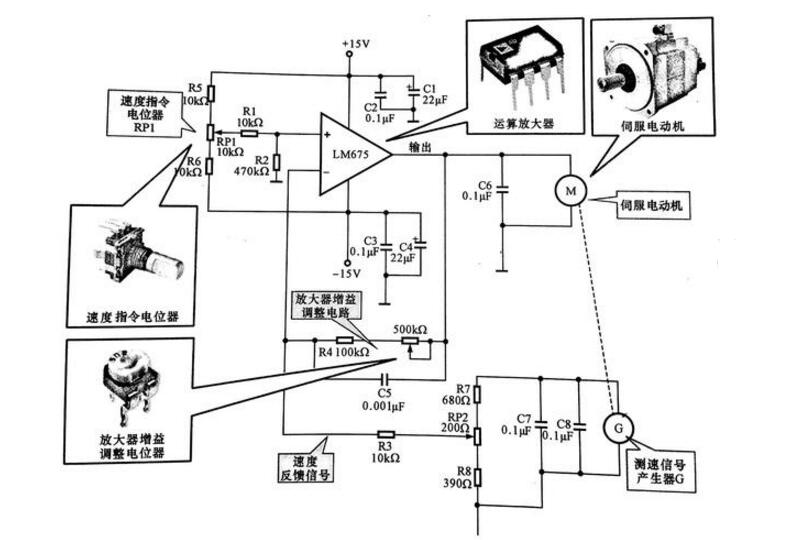
Servomootori juhtimisskeem
Servomootor: servomootori puhul tähistatud tähega M, see on ajamisüsteemi toiteallikas. Operatsioonivõimendi: tähistatud vooluringi nimega, st LM675, on servojuhtimisahelas olev võimendi, mis tagab servomootori ajamivoolu.
Kiiruse käskluse potentsiomeeter RP1: Määrab ahelas operatiivvõimendi tugipinge, st kiiruse seadistuse. Võimendi võimenduse reguleerimise potentsiomeeter RP2: kasutatakse ahelas vastavalt võimendi võimenduse ja kiiruse tagasiside signaali suuruse peenhäälestamiseks.
Mootori koormuse muutumisel muutub ka töövõimendi pöördsisendisse tagasi antav pinge, st mootori koormuse suurendamisel kiirus väheneb ja kiirussignaali generaatori väljundpinge samuti väheneb, nii et töövõimendi pöördsisendi pinge väheneb, töövõimendi tööpinge ja selle tööpinge tööpinge ja tööpinge erinevus väheneb. võimendi suureneb. Vastupidiselt, kui koormus väheneb ja mootori pöörlemissagedus suureneb, tõuseb kiiruse mõõtesignaali generaatori väljundpinge, suureneb operatiivvõimendi pöördsisendile lisatud tagasisidepinge, selle pinge ja võrdluspinge erinevus väheneb, operatiivvõimendi väljundpinge väheneb ja mootori pöörlemiskiirus väheneb automaatselt vastavalt määratud pöörlemiskiirusele.


