
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Kodu
>
Tooted > RS485 või CAN või Ethercat Bus tüüpi Stepper Driver > SAAB avada Stepperi draiveri > 2-faasiline Ethercat Nema34 12nm avatud ahelaga samm-draiver OL3-E86H
Tooted
- Vahelduvvoolu servomootor
- DC servomootor
- Suletud ahelaga samm-mootor
- Hübriid samm-mootor
- Hybird Stepper mootori juht
- Suletud ahelaga samm-mootori draiver
- AC servomootori draiver
- Integreeritud samm-mootor
- DC servomootori draiver
- Kruvi mootor
- RS485 või CAN või Ethercat Bus tüüpi Stepper Driver
- Planetaarne reduktor
- PLC kontroller
- HMI puutetundlik ekraan
- Ethercat vahelduvvoolu servomootori draiveri komplekt
- A8 vahelduvvoolu servomootori draiveri komplekt
- Integreeritud servomootor
Uued tooted
 Lichuani vahelduvvoolu servomootori draiverite komplekt SUUR VÕIMSUS 235N.m 37KW AC380V 73A 1500/2000RPM IP65
Lichuani vahelduvvoolu servomootori draiverite komplekt SUUR VÕIMSUS 235N.m 37KW AC380V 73A 1500/2000RPM IP65 Lichuani vahelduvvoolu servomootori draiverite komplekt SUUR VÕIMSUS 191N.m 30KW AC380V 52A 1500/2000RPM IP65
Lichuani vahelduvvoolu servomootori draiverite komplekt SUUR VÕIMSUS 191N.m 30KW AC380V 52A 1500/2000RPM IP65 Lichuani vahelduvvoolu servomootori draiverite komplekt SUUR VÕIMSUS 140N.m 22KW AC380V 44.7A 1500/2000RPM IP65
Lichuani vahelduvvoolu servomootori draiverite komplekt SUUR VÕIMSUS 140N.m 22KW AC380V 44.7A 1500/2000RPM IP65 Lichuani vahelduvvoolu servomootori draiverite komplekt SUUR VÕIMSUS 88N.m 18,5KW AC380V 31.6A 1500/2000RPM IP65
Lichuani vahelduvvoolu servomootori draiverite komplekt SUUR VÕIMSUS 88N.m 18,5KW AC380V 31.6A 1500/2000RPM IP65- Kõik uued tooted

2-faasiline Ethercat Nema34 12nm avatud ahelaga samm-draiver OL3-E86H
Olete teretulnud tulema LICHUAN® tehasesse, et osta uusim müüdud, madala hinnaga ja kvaliteetne 2-faasiline Ethercat Nema34 12nm avatud ahelaga Stepper Driver OL3-E86H. Ootame teiega koostööd.
Saada päring
Tootekirjeldus
LICHUAN® tervitame teid meie Hiina tehasest pärit kahefaasilise Ethercat Nema34 12nm avatud ahelaga Stepper Driver OL3-E86H hulgimüügis. Meie tooted on CE-sertifikaadiga ja neil on praegu suur hulk tehasevarusid. Lichuani tehasel on rohkem kui 14-aastane tootmiskogemus. Toetame OEM-i ja ODM-i, pakume teile head teenindust ja tehase soodushindu. Ootame rohkem turustajaid liituma LICHUANiga.
EtherCAT siini tüüpi suletud ahelaga sammdraiver on digitaalne suletud ahelaga sammdraiver, mis ühendab endas uusimad
suletud ahela juhtimisalgoritm ja EtherCAT siini sideprotokoll. See toode toetab CoE (CANopen over EtherCAT) protokolli ja vastab standardile CIA402. Võrreldes traditsioonilise impulss-tüüpi draiveriga,
siini tüüpi draiveril on lihtsam juhtmestik, reaalajas andmeedastus, kõrge usaldusväärsusega side ja seda saab realiseerida
mitmeteljeline sünkroonse side juhtimine. See draiverite seeria proovib täiustatud suletud ahela algoritme,
mis võib tõhusalt maha suruda mootori temperatuuri tõusu, vähendada mootori vibratsiooni ja tõhusalt suurendada mootorit
pöördemoment. Seda saab kohandada 86-seeria suletud ahelaga samm-mootoritele.
Side spetsifikatsioonid
| EtherCAT Suhtlemine spetsifikatsioonid |
Füüsiline kiht | 100BASE-TX |
| Sidepistik | RJ45 × 2 (sisend: CN6A; väljund: CN6B) | |
| Võrk arhitektuur |
Jadaühendus | |
| Edastuskiirus | 2 x 1 Mbps (täisdupleks) | |
| Andmeraami pikkus | Max 1484 baiti | |
| Rakenduse kihi protokoll | CoE: CANopen üle EtherCAT | |
| Sünkroonrežiim | DC sünkroonrežiim (SYNCO) Asünkroonne režiim (tasuta käitamine) |
|
| Suhtlusobjekt | SDO: perioodiline andmeobjekt KPN: perioodiline andmeobjekt EMCY: hädaabiobjekt |
|
| Rakenduse kihi spetsifikatsioon | CiA402 draivi profiil | |
| Toetatud juhtimisrežiimid | Profiili positsiooni režiim (PP) Profiili kiiruse režiim (PV) Kodurežiim (HM) Lülitage sünkroonitud asukoha režiim (CSP) sisse |
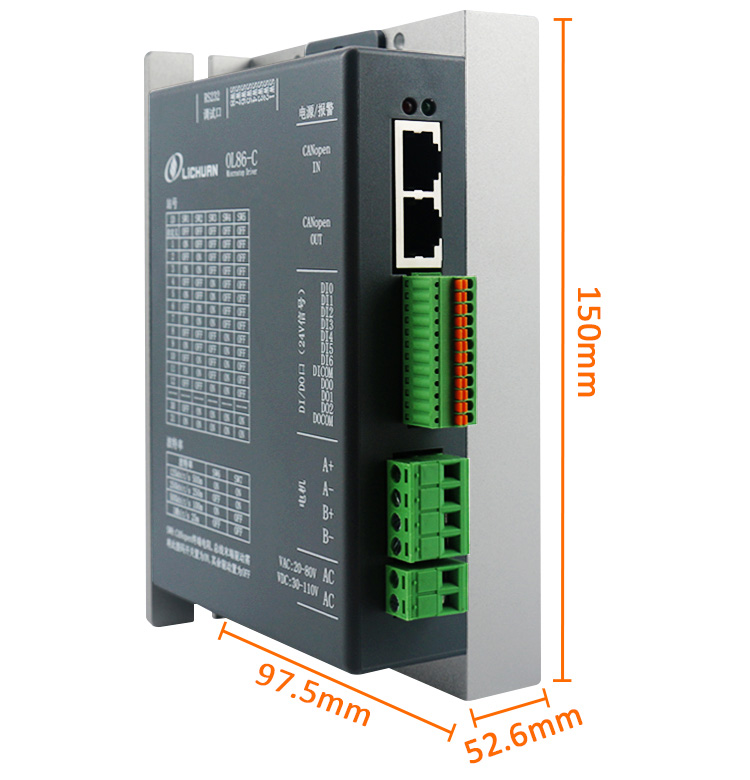
2-faasiline Ethercat Nema34 12nm avatud ahelaga samm-draiveri OL3-E86H spetsifikatsioonid
| Sõidumudel Parameeter | OL3-E57H | CL3-E57H | OL3-E86H | CL3-E86H |
| Sobiv mootor | 42/57/60 | 42/57/60 | 86 | 86 |
| Toitepinge | 24–48 V alalisvoolu | 24–48 V alalisvoolu | 24–80 V vahelduvvoolu | 24–80 V vahelduvvoolu |
| Väljundvool | 5A | 5A | 8A | 8A |
| draivi suurus | 133*34*90 | 133*34*90 | 151*40*114 | 151*40*114 |
| Kaalu juhtimine |
|
|
|
|

Lichuani tehase tootmistoodete masin
-

Nikerdusmasin -

Pindamisseadmed -

Fiber laster markeerimismasin -

Kruvimasin -

Testimismasin -

UV-printer
-

Automaatne jootmismasin -

Hoides pöördemomendi testimismasinat -

Kruvimasin -

Ostsillograafi masin
Tööstusrakendused
-

Roboti käsi -

Laserlõikusmasin
-

3D printimine -

CNC masin -

Automaatne kinnitamine -

Graveerimismasin
Kuumad sildid: 2-faasiline Ethercat Nema34 avatud ahelaga samm-draiver OL3-E86H, Hiina, tootjad, tarnijad, tehas, kohandatud, valmistatud Hiinas, odav, CE, vastupidav, kvaliteetne
Seotud kategooria
Saada päring
Palun esitage oma päring allolevas vormis. Vastame teile 24 tunni jooksul.




